| 4 ноября 2021 г. — 4:08 утра по тихоокеанскому времени

Николас Реем, будучи инженером-аэрокосмическим конструктором, добился успеха в создании самодельного беспилотного летательного аппарата (БПЛА), который обходит препятствия без стандартной GPS-технологии на борту, и это заслуживает стоячих оваций. Он также достоин глубокого поклона за то, что описал весь сложный процесс очень увлекательным способом.
Реем не новичок в домашних проектах по созданию дронов — как с GPS, так и без него. Учитывая образование и опыт, необходимые для его основной работы, нет никаких сомнений, что его DIY-проекты, как правило, намного сложнее, чем обычные любительские аппараты, которые (как говорили в старые времена удрученные советские граждане) «собираются кое-как». На его YouTube-странице размещено более дюжины обучающих видеороликов о том, как он разрабатывал и собирал свои весьма сложные БПЛА, обычно прибегая к остроумной недосказанности или иронии, чтобы сгладить сложность деталей процесса, который он объясняет.
Совершенно очевидно, что Реем не только приносит работу домой, но и создает дополнительные труды любви, чтобы заразить других своей страстью к дронам и другим летательным аппаратам.
«Я инженер-аэрокосмический конструктор, но в свободное время люблю работать над интересными летательными проектами: дронами, самолетами, VTOL и всем, что между ними», — говорит он на своей видеостранице. «Моя цель — делиться тем, что я узнаю по пути, и делать продвинутые концепции менее пугающими».
Именно это чудо он и демонстрирует в этом видео, рассказывая, как он создал самодельный дрон, который избегает препятствий, не используя стандартную GPS-технологию, присутствующую на большинстве БПЛА, и даже не нуждаясь в подключении к внешним каналам связи. Это не только делает его автономное транспортное средство невосприимчивым к столкновениям или внешним устройствам помех, но и чрезвычайно крутым.
Первоначальная идея Рема заключалась в том, чтобы найти жизнеспособную альтернативу стандартным системам автономной навигации и обхода препятствий. Они требуют ввода заранее спланированного маршрута полета на карте, точка за точкой, которому аппарат следует последовательно до достижения назначенного пункта назначения.
«Дрон на самом деле довольно тупой, в том смысле, что он может летать только из одной точки в другую, не воспринимая окружающий мир, ему нужно говорить, что делать на каждом шагу», — объясняет Реем в видео.
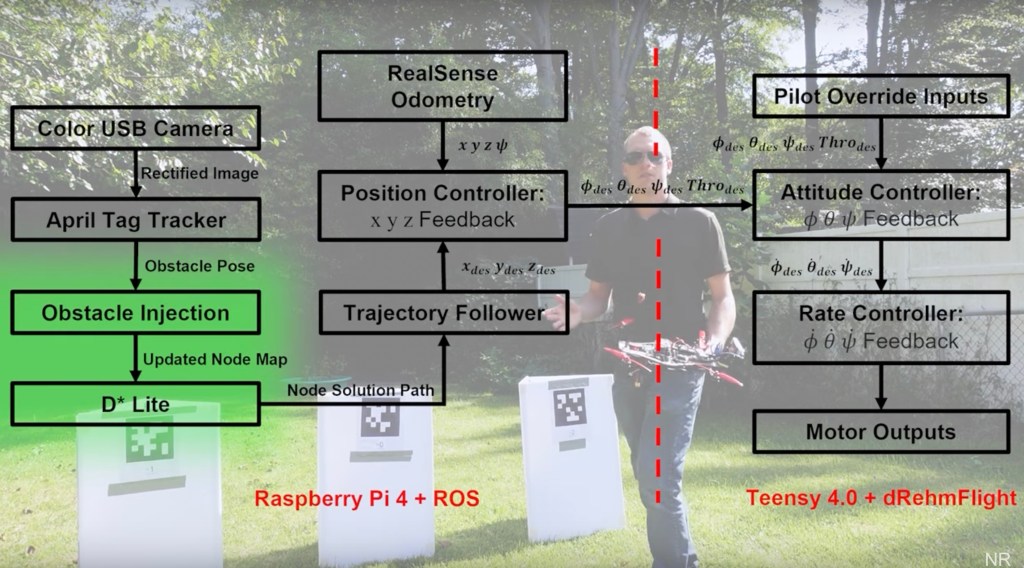
Чтобы исправить это, он заменил отказавшийся от GPS GPS алгоритмами, работающими с Google Maps. Они взаимодействуют с данными, получаемыми от бортового блока измерения инерционных данных дрона, камер, высотомера, датчиков положения и движения. Все это, управляемое Raspberry Pi 4 с использованием операционной системы Robot Operating System, позволяет аппарату находить путь вокруг препятствий, с которыми он сталкивается по мере продвижения.
В отличие от последовательного продвижения в системах, основанных на путевых точках, дрон Рема лишь знает, куда ему нужно лететь и куда вернуться, а дальше он действует самостоятельно. Как демонстрирует видео, когда БПЛА сталкивается с препятствием, его программы обнаруживают чистую, но ограниченную область с любой стороны, чтобы обойти его. Этот ограниченный диапазон обнаружения свободного пространства используется каждый раз, когда продвигающийся БПЛА сталкивается с препятствием, прокладывая маршрут в обход каждого, но в остальном свободно летая до достижения пункта назначения.
Довольно легкомысленно отмахнувшись от огромной математики и инженерии, необходимых для такого достижения, Реем напоминает зрителям, что его DIY-проект — лишь один из многих, которые они могут вывести на новый уровень.
«Как только у вас будут основные строительные блоки для такого сложного проекта, довольно легко вернуться и расширить эти отдельные элементы, чтобы сделать общую систему более мощной», — говорит Реем в конце видео, пока его дрон без GPS завис в нескольких футах от него. «Например, мы могли бы заменить алгоритм обнаружения AprilTag, который я использовал, на что-то более надежное, возможно, для обнаружения зданий; или мы могли бы расширить наше планирование движения с двух до трех измерений».
Легче сказать (и поверить) Рему, чем большинству, хотя очевидно, что он искренен, завершая свое выступление, выражая мотивацию для своих передовых видео о «собираемых кое-как» дронах.
«Надеюсь, вы узнали что-то интересное».