| 18 янв 2022 г. — 4:45 утра по тихоокеанскому времени
Исследователи из Калифорнийского университета в Беркли разработали дрон, шарнирные плечи которого могут складываться из горизонтального в вертикальное положение, чтобы проходить в узкие пространства или переносить легкие предметы.
Целью исследователей из Лаборатории высокопроизводительной робототехники Беркли (HiPeRLab) было создание квадрокоптера, способного поднимать и опускать свои плечи во время полета, чтобы приспосабливаться к ограниченным пространствам или расширять спектр выполняемых задач. Для этого они вставили шарниры между корпусом квадратного аппарата и его оснащенными роторами придатками, чтобы обеспечить их опускание и подъем. Однако, в отличие от других экспериментальных БПЛА, модифицированных для аналогичных складывающихся движений, ученые из HiPeRLab нашли способ, чтобы сам дрон питался от всего этого складывания.
Предыдущие аппараты с регулируемыми конечностями, созданные такими лабораториями, как инженерно-технологическая школа Университета Пердью (школа), были оснащены приводами, которые перемещали плечи и роторы в различные положения, делая их более эффективными в определенных условиях, таких как сильный ветер. Сотрудники HiPeRLab хотели избежать использования приводов, которые разряжают батареи дрона и, следовательно, сокращают время его полета. Их решение: использовать пассивные шарниры, складывание которых вверх и вниз осуществляется самими роторами.
В своей статье «Дизайн и управление квадрокоптером, переконфигурируемым в воздухе, с использованием неактивируемых шарниров» Нейтан Бакки, Джерри Тан и Марк У. Мюллер из HiPeRLab подробно описывают, как функционирует их самоскладывающийся дрон. Хотя это видео еще более доступно для неспециалистов, трио объясняет работу своей системы довольно простыми словами.
«Переходы конфигурации осуществляются путем уменьшения или реверсирования тяговых сил, создаваемых определенными пропеллерами во время полета», — пишут они. «Ограничения, налагаемые на управляющие воздействия аппарата, предотвращают неожиданное складывание или раскладывание плеч, позволяя использовать существующие контроллеры квадрокоптера и алгоритмы генерации траекторий. Для нашего экспериментального аппарата в режиме висения мы обнаружили, что эти ограничения приводят к 36%-ному снижению максимального крутящего момента рыскания, который может производить аппарат, но не приводят к снижению максимальной тяги или крутящих моментов крена и тангажа. Кроме того, показано, что способность изменять конфигурации позволяет аппарату проходить через небольшие проходы, садиться на висящие провода и выполнять простые задачи захвата».
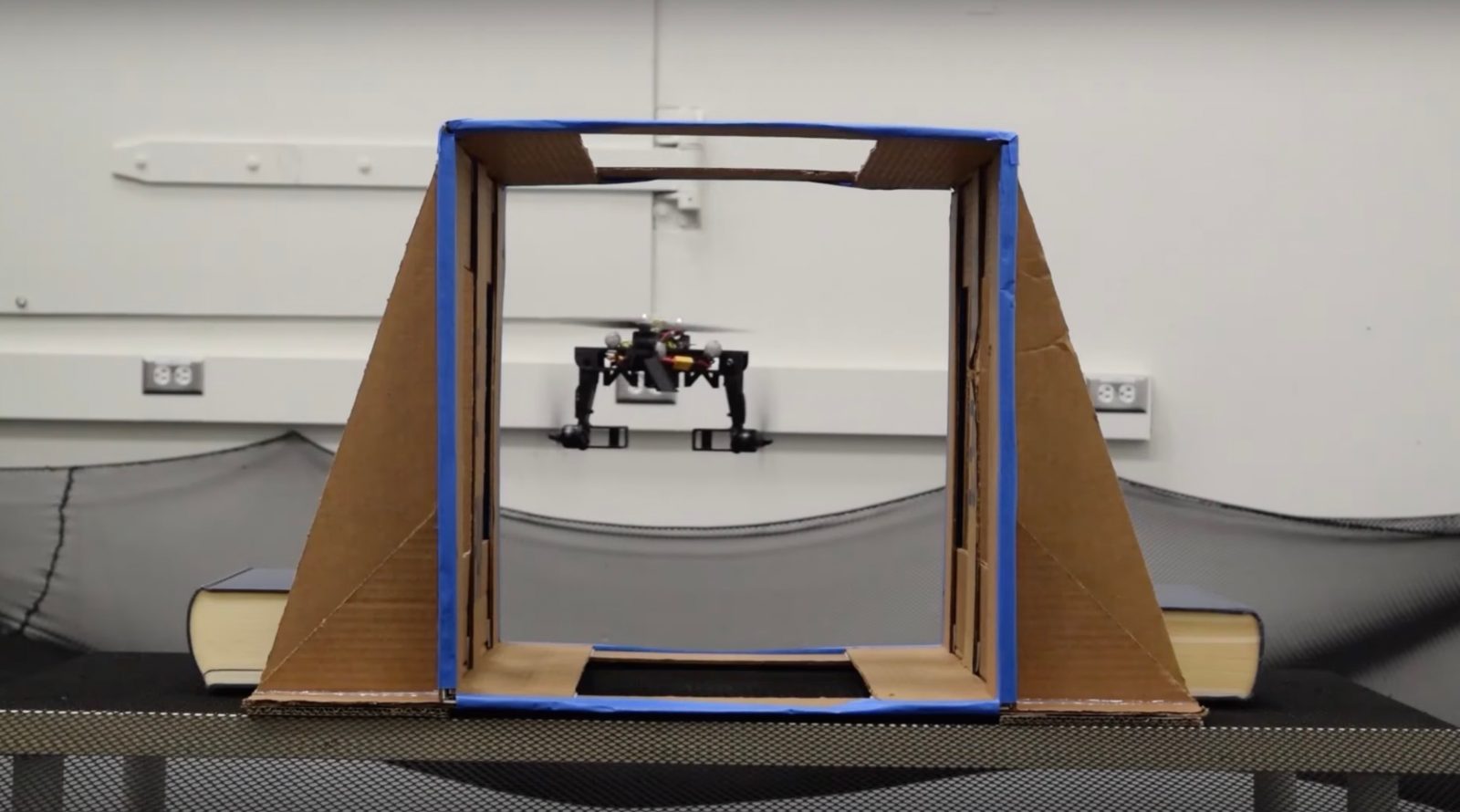
Говоря еще более простым языком, определенное изменение тяги пропеллера создает силу, необходимую для опускания (или последующего подъема) двух противоположных плеч, не затрагивая способность другой пары удерживать дрон в воздухе. В этих вертикальных положениях два сложенных конечности позволяют уменьшенному в размерах аппарату проходить через ограниченное пространство «боком» или захватывать легкие объекты для транспортировки в другое место.
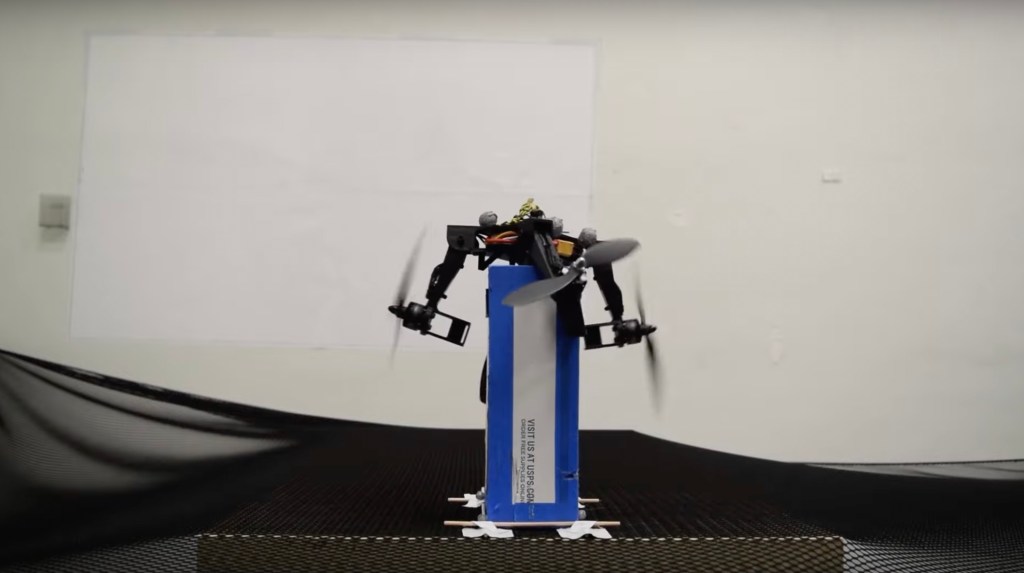
Между тем, в руках мастера управления пассивные шарниры позволяют дрону опускаться и отдыхать на приподнятом канате или проволоке, используя свои сложенные, свисающие плечи для центрирования веса.
