| 20 сентября 2022 г. – 2:45 утра по тихоокеанскому времени
Хотите достигать более высоких скоростей, одновременно улучшая производительность аккумулятора в воздухе? Группа исследователей из UC Berkeley, возможно, нашла способ добиться этого, экспериментируя с самонаклоняющимися роторами, которые удерживают дрон в горизонтальном положении, тем самым уменьшая сопротивление.
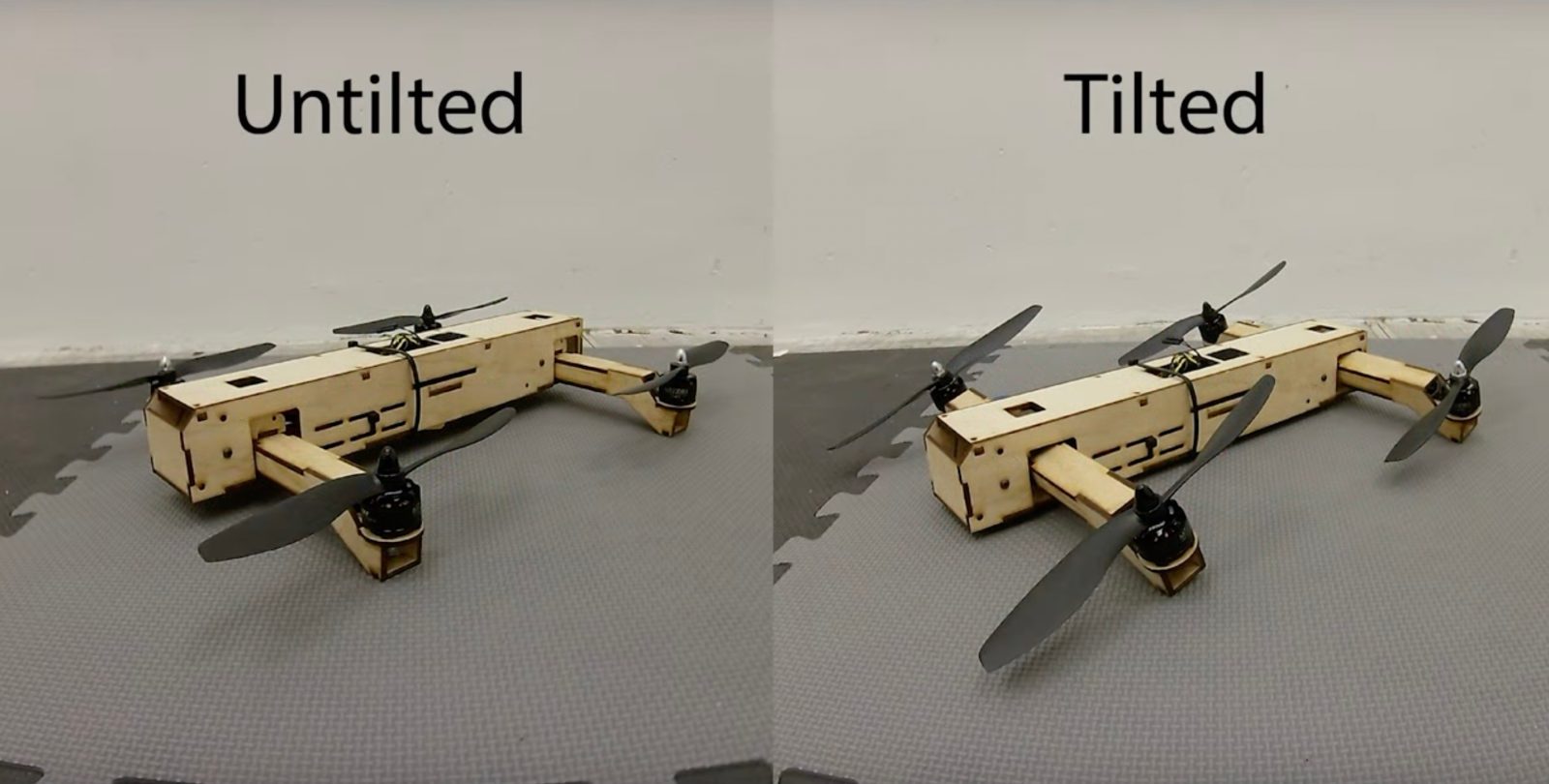
Испытания дрона с наклоняемым ротором проводились сотрудниками лаборатории высокопроизводительной робототехники Калифорнийского университета в Беркли, факультета машиностроения, и были направлены на минимизацию «площади сопротивления аппарата и, следовательно, обеспечение более быстрого, маневренного и эффективного полета». Для этого они создали квадрокоптер с неактивируемым механизмом наклона ротора, чьи поворотные пропеллеры обеспечивали быстрое прямолинейное движение, удерживая корпус дрона плоским – положение, которое минимизирует аэродинамическое сопротивление и повышает производительность.
Читайте: Исследователи из Беркли разработали самоскладывающиеся в полете дроновые манипуляторы
Действительно, в ходе своих испытаний команда обнаружила, что их тестовый дрон – в периоды увеличения тяги – летал на 12,5% быстрее с наклоняемыми роторами, чем тот же аппарат с зафиксированными в одном положении пропеллерными узлами. Маневренность гибкого БПЛА на максимальных скоростях также была на 7,5% выше, чем при работе в традиционной конфигурации, а энергоэффективность улучшилась на 20%.
Это, конечно, означает, что если механизм наклоняемого ротора будет адаптирован для серийных дронов, пилоты смогут выполнять более быстрые миссии большей продолжительности благодаря улучшенной работе аккумулятора.
Конечно, уже велись работы по разработке механизмов наклона ротора на дронах, но до сих пор все они опирались на добавление приводов для перемещения пропеллеров в нужное положение.
Эксперимент в Беркли, напротив, соединил поворотные части с крыльями с помощью пружин, которые удерживали их горизонтально к корпусу на низких скоростях полета, но позволяли им наклоняться вниз под давлением набегающего ветра при ускорении.
Читайте: Защита дрона с помощью тенсегрити
В отличие от традиционных дронов, нос которых опускается вниз во время тяги, подвергая заднюю часть большему сопротивлению, наклоняемые роторы позволили тестовому аппарату оставаться плоским и более аэродинамически эффективным. Выгодно для всех.
Но хотя увеличение скорости и энергоэффективности, безусловно, являются большими достижениями этой инновации, исследователи из Беркли отметили в своей письменной презентации, что есть и некоторые компромиссы.
«(У) этого аппарата несколько сокращен диапазон тяги и крутящих моментов», – отмечают они. «Это связано с тем, что для предотвращения непреднамеренного наклона и выпрямления необходимо ввести дополнительные ограничения по тяге на пропеллеры. Кроме того, существует небольшое увеличение массы и механической сложности аппарата за счет добавления механизма наклона.
«Таким образом, мы утверждаем, что предложенная конструкция выгодна по сравнению с существующими решениями, когда квадрокоптер в основном должен взлетать и садиться вертикально, а также летать на высокой скорости с высокой маневренностью», – продолжают они. «Такие применения распространены, когда цели чувствительны ко времени, например, дальнемагистральная доставка посылок, гонки дронов, поисково-спасательные операции».